


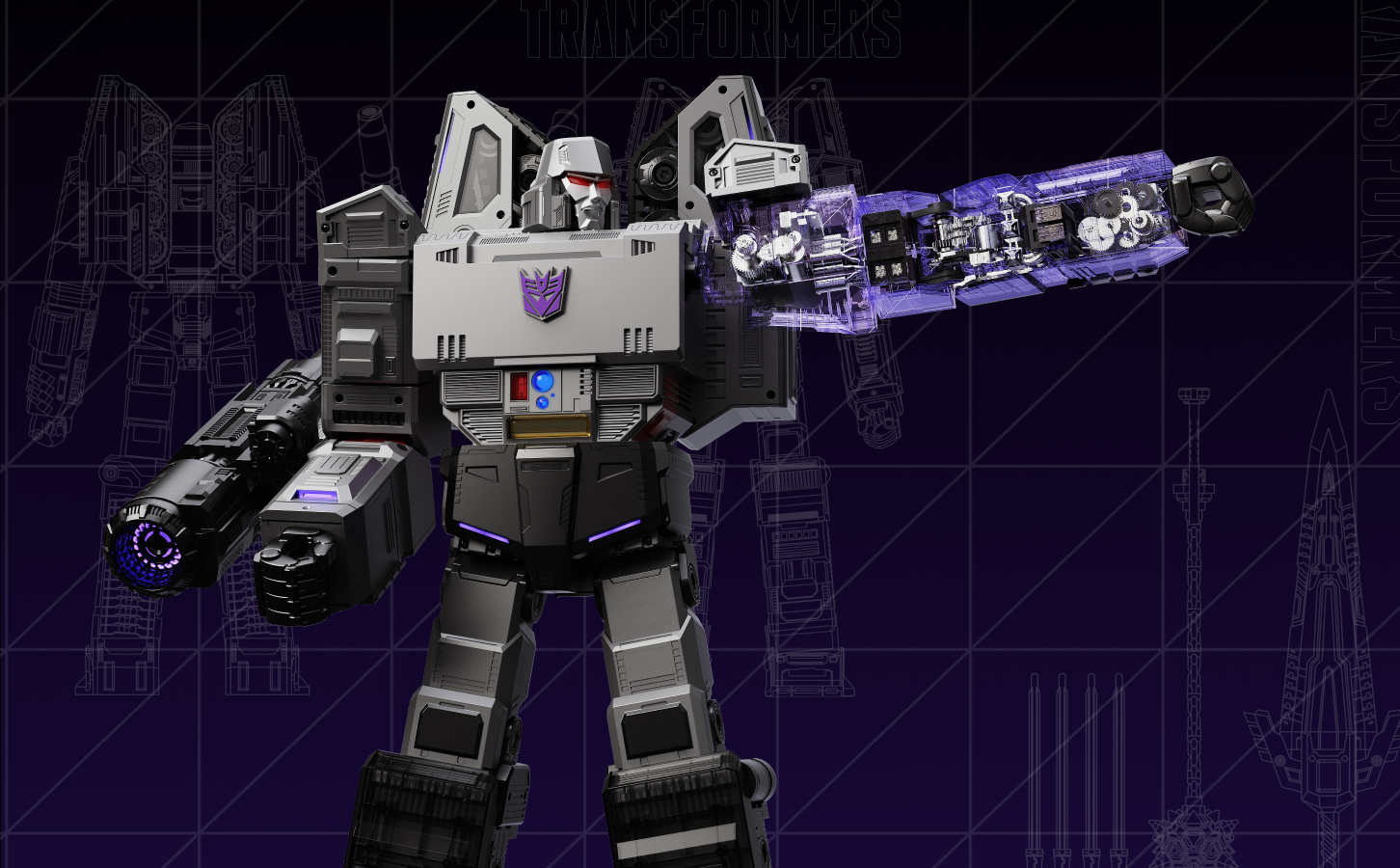
Selbstentwickelte hochpräzise Chips und intelligente Gelenke
Dieser "Megatron" ist mit über 4500 Teilen ausgestattet, darunter 36 selbst entwickelte hochpräzise intelligente Gelenke. Er verwendet 118 Mikrochips für algorithmusgesteuerte Bewegungssteuerung, setzt einen Sechs-Achsen-Lagesensor ein, was ihn zu stabilen, flexiblen Bewegungen befähigt.

Komplexe Bewegungen und Transformationen
Für Roboter sind die Servos die wichtigsten Komponenten, weil sie die jedes Gelenk antreiben. Die Flexibilität eines Roboters und dessen Geschwindigkeit, Stabilität und Genauigkeit hängen von der Leistung der Servos ab. Schließlich fungieren Servos (oder allgemein als Motoren bekannt) sowohl als "Muskeln" als auch als "Gelenke" für Roboter. Sie müssen jeden Körperteil antreiben, um sich zu bewegen (dynamisches Gleichgewicht), und sie müssen auch über ausreichende mechanische Stärke verfügen, um verschiedene Körperhaltungen des Roboters zu unterstützen (statische Stabilität).
Je mehr Servos der Roboter hat, desto mehr bewegliche Gelenke und die Möglichkeit für den Roboter, komplexere Bewegungen auszuführen und feinere Transformationen zu erreichen. Allerdings erhöhen mehr Servos natürlich die ästhetischen Anforderungen an die Roboterstruktur und die mechanische Stärke der Servos selbst.
Im Vergleich zu gewöhnlichen humanoiden Robotern ist das "automatische Transformieren" das Hauptmerkmal von Megatron. Das bedeutet, dass alle Servos sowohl im "Panzermodus" als auch im "Menschenmodus" arbeiten müssen. Einige Servos können verwendet werden, damit der Roboter im Menschenmodus bewegen kann, aber im Panzermodus müssen sie verwendet werden, damit die Bewegung des Fahrzeugs gesteuert werden kann.
Dies macht nicht nur die interne mechanische Struktur von Megatron viel komplexer, sondern erfordert auch die Entwicklung spezifischer Hochleistungs-Servos, die nicht nur klein sind, sondern auch ein hohes Drehmoment besitzen, um seinen massiven Körper zu betreiben.
Neben der Leistung müssen auch andere Faktoren für die Servos berücksichtigt werden, einschließlich der strukturellen Gestaltung der externen Gehäusematerialien, der rationalen Planung des Transformationsprozesses, der Reihenfolge und physischer Faktoren wie Reibungswiderstand und Verschiebung des Schwerpunkts.

Hohe Reduktion und hohe Leistung
Da Megatron ein IP-Kollaborationsprodukt ist, bedeutet dies, dass Ingenieure und Designer sicherstellen müssen, dass das Aussehen hochrestauriert ist, während die Servos, die die Bewegung jedes Gelenks unterstützen, in seinen Körper eingebettet werden. Folglich müssen viele Servos in Bezug auf Aussehen und Größe neu gestaltet werden, um Megatrons eigene Körperproportionen zu berücksichtigen. Gleichzeitig bringen die neu gestalteten Servos Änderungen in der Leistung mit sich, und ob sie ausreichend kinetische Energie und Unterstützung für den Roboter bereitstellen können, wird zu einem angehängten technischen "Paradoxon".
In Bezug auf den Bewegungsalgorithmus und den Gangalgorithmus des Roboters, auf der Basis der Tatsache, dass Megatron selbst größer, schwerer und viele mehr Gelenke hat, bedeutet dies: Wenn er sich "bewegt", insbesondere wenn er auf zwei Beinen geht, müssen fast alle Servos im gesamten Körper kontinuierlich angepasst werden, um das Gleichgewicht des Schwerpunkts während des "Schritts" des Roboters aufrechtzuerhalten.
Offensichtlich erfordert dies Dutzende von Servos und ihren Antriebsalgorithmen eng zusammenzuarbeiten, und noch wichtiger ist, dass genügend Sensoren im Inneren des Roboters den Schwerpunkt, die Reibungskraft, den Winkel und andere Daten kontinuierlich erfassen müssen.


{kind=link}
Hinterlasse einen Kommentar
Alle Kommentare werden vor der Veröffentlichung geprüft.
Diese Website ist durch hCaptcha geschützt und es gelten die allgemeinen Geschäftsbedingungen und Datenschutzbestimmungen von hCaptcha.